第二種電気主任技術者 二次試験「機械・制御」の問4では、制御工学の基礎から応用まで幅広いテーマが出題されます。
特に、フィードバック制御、伝達関数、安定判別、状態方程式など、制御システムの理解を問う問題が中心です。
この記事では、平成25年以降の出題テーマを一覧化し、どの年度にどの制御テーマが出題されたかを体系的に整理しています。
- 令和7年度 フィードバック制御系の伝達関数,標準偏差など
- 令和6年度 直列結合・並列結合された制御系
- 令和5年度 ゲイン特性曲線からの伝達関数導出
- 令和4年度 積分器を含むフィードバック制御系
- 令和3年度 フィードバック制御系の安定条件(ラウス・フルビッツ)
- 令和2年度 直列補償器を用いたフィードバック制御系
- 令和元年度 閉ループ系の特性根
- 平成30年度 2 自由制御系
- 平成29年度 RLC 直列回路の電圧(2 次遅れ系)
- 平成28年度 状態方程式で記述される制御系
- 平成27年度 フィードバック制御系の制御定数調整
- 平成26年度 フィードバック制御系の定常偏差と制御量の最終値
- 平成25年度 制御系の安定限界
- 「機械・制御」過去問題一覧
令和7年度 フィードバック制御系の伝達関数,標準偏差など
令和7年度は,オーソドックスなフィードバック制御に関するテーマです。
伝達関数,定常偏差,インパルス応答,目標信号としてステップ信号を入力したときの制御量を回答します。

令和6年度 直列結合・並列結合された制御系
伝達関数を直列結合した制御系と並列結合した制御系がテーマです。
直列結合された伝達関数に単位ステップ信号を加えたときの出力量の定常値を求めます。
並列結合された制御系のインパルス信号や指数関数を加えたときの時間応答,周波数を十分に大きくしたときの位相を求めます。
令和5年度 ゲイン特性曲線からの伝達関数導出
ゲイン特性曲線から伝達関数を求めることがでーまです。
ゲイン特性曲線を分解して考えます。
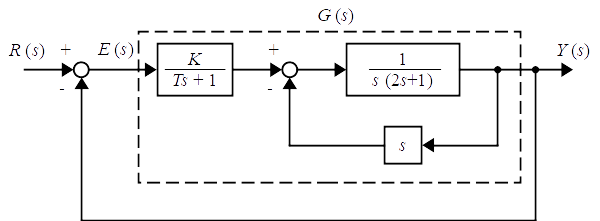
令和4年度 積分器を含むフィードバック制御系
積分器を用いたフィードバック制御系の特性方程式を求め,安定とするための条件を求めます。
また,目標値から制御偏差までの伝達関数を求め,定常速度偏差を求めます。
令和3年度 フィードバック制御系の安定条件(ラウス・フルビッツ)
フィードバック制御系の開ループ伝達関数や閉ループ伝達関数を求めます。
閉ループ伝達関数においては,制御系を安定にする条件をラウス・フルビッツの安定判別法を適用して求めます。
令和2年度 直列補償器を用いたフィードバック制御系
直列補償器を用いたフィードバック制御系の定常速度偏差,減衰係数,固有角周波数を求める問題です。
令和元年度 閉ループ系の特性根
閉ループ系の特性根のうち二つをある値にするための係数を求めます。また,その係数を用いて,単インパルス応答を求めます。
平成30年度 2 自由制御系
2 自由制御系のゲイン特性,閉ループ伝達関数を求める問題です。

ゲイン特性の概形を答案用紙に印刷されている図に折れ線近似で図示します。

平成29年度 RLC 直列回路の電圧(2 次遅れ系)
RLC 直列回路に入力する電圧より,出力する電圧を求めます。その電圧関数は 2 次遅れ系となり,RLC それぞれのパラメータを指定したときの固有角周波数及び減衰定数を求めます。
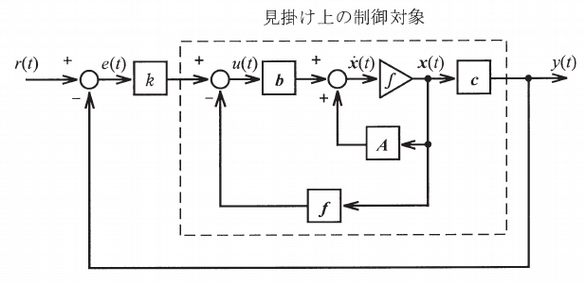
平成28年度 状態方程式で記述される制御系
状態方程式で記述される制御系に関する問題です。
平成27年度 フィードバック制御系の制御定数調整
制御定数を調整することで,フィードバック制御系の目標値から制御量までの伝達関数を,望ましい動特性を実現する参照モデルの伝達関数に一致させることを考えます。
平成26年度 フィードバック制御系の定常偏差と制御量の最終値
フィードバック制御系の伝達関数を求め,ステップ信号やランプ信号を入力したときの定常偏差を求めます。
また,外乱としてステップ応答やランプ信号を印加したときの制御量の最終値を求めます。
平成25年度 制御系の安定限界
制御系が安定限界となるときのパラメータを求めます。また,ランプ状の目標値に対する定常偏差を求めます。
「機械・制御」過去問題一覧
第二種電気主任技術者 二次試験「機械・制御」過去問題の一覧を以下のページにまとめています。