三相誘導電動機(induction motor)の一次巻線に三相交流電源を接続すると回転磁界が発生する。
誘導機(induction machine)とは,固定子および回転子がたがいに独立した巻線を有し,一方の巻線が他方の巻線から誘導電動作用によってエネルギーを受けて動作する非同期機。(出典)電気学会 電気専門用語集(WEB 版)
回転磁界と回転子の回転速度に差があると,回転子の二次巻線に誘導電流が流れ,回転磁界との間でトルクが生じる。
このとき,発生するトルクは,回転磁界と回転子の回転速度の差を減少させる方向に働く。
誘導電動機の L 形等価回路
図は,三相誘導電動機の 1 相分の L 形等価回路である。

三相変圧器や三相誘導電動機の一次換算等価回路を作成する場合,二次側の諸量を一次側に換算する必要がある。
変圧器では,一次・二次巻線間の巻数比が換算係数として使用されるが,誘導電動機では,巻数比に加えて,巻数係数及び相数を考慮する必要がある。
$m_1$ 相の対称交流を電源とする多相誘導電動機の一次及び二次巻線一相の巻数を $w_1$ 及び $w_2$,巻数係数を $k_{w1}$ 及び $k_{w2}$,相数を $m_1$ 及び $m_2$,一次及び二次 1 相の抵抗及び漏れリアクタンスをそれぞれ $r_1$,$r_2$,$x_1$,$x_2$ とする。
なお,二次リアクタンス $x_2$ は,回転子静止時の値とする。
回転子を静止させた状態で一次巻線に三相電源を印加すると励磁電流が流れ回転磁界が生じて,一次誘導起電力 $\dot{E}_1$,二次誘導起電力 $\dot{E}_2$ が誘導される。
この誘導起電力の比は $\displaystyle \dot{E}_2 = \frac{\dot{E}_1}{u_\text{e}}$,$\displaystyle u_\text{e} = \frac{k_\text{w1} w_1}{k_\text{w2} w_2}$ で示される。
$\dot{E}_2$ は二次回路に印加され,二次巻数の電流 $\dot{I}_2$ は $\displaystyle \frac{\dot{E}_2}{r_2 + \text{j}x_2}$ となる。
この $\dot{I}_2$ による起磁力を打ち消すために一次側に ${I_1}'=u_\text{i}I_2$ が流れる。
$u_\text{i}=$ $\displaystyle \frac{m_2 k_\text{w2} w_2}{m_1 k_\text{w1} w_1}$ であらわされ,この ${I_1}'$ が二次電流 $\dot{I}_2$ の一次側への換算値となる。
$r_2$ 及び $x_2$ を一次側へ換算するには,変換係数 $\displaystyle \frac{m_1 (k_\text{w1} w_1)^2}{m_2 (k_\text{w2} w_2)^2}$ をかければよい。
三相巻線形電動機では,$m_1=3$,$m_2=3$ である。
三相かご形誘導電動機では,二次側回転子の全導体数を $K$,極対数を $p$ とすれば,電気角 $2\pi$ 当たりの導体数は $\displaystyle \frac{K}{p}$ であり,相数 $m_2$ に等しい。
よって二次一相分の導体数は 1,巻数は $w_2=$ $\displaystyle \frac{1}{2}$,巻数係数は $k_\text{w2}=1$ となる。
三相誘導電動機の基本的な特性
巻線形三相誘導電動機の二次端子を開放した状態で,一次巻線に一定周波数 $f_1$ の三相正弦波交流電圧を印加すると,励磁電流は流れるが,二次電流が流れないので回転子は回転しない。
二次電流を短絡すると二次電流が流れ,これと一次電流により発生する回転磁界とによって,回転子にトルクが発生し,回転子は回転し始める。
回転子が滑り $s$ で回転している場合,回転速度を $n_0$ とすれば回転子の回転速度は $(1 - s)n_0$ で表され,このとき,二次巻線に発生する起電力の周波数は $sf_1$ である。
回転子に負荷を接続し,その負荷を増大させると回転速度は低下する。
すなわち,滑りは増加することになり二次巻線に発生する起電力が大きくなる。
その結果,二次電流が増加し,負荷トルクと平衡するだけの大きさのトルクを発生する。
0 < $s$ < 1 の領域
通常の誘導電動機動作で,回転子は回転磁界と同方向に同期速度以下で回転し,発生トルクは正である。
$s$ < 0 の領域
回転子は回転磁界と同方向に同期速度以上で回転する。
したがって,入力は負であり,トルクは回転方向と反対方向となるので,電動機運転では制動トルクとなる。
このため回転体の運動エネルギーを吸収して電源に電力として返還されるので,効率よく制動できる。これを回生制動という。
もし,負荷トルクが発電機としての最大トルクの点を超えると逸走する。
三相巻線形誘導機の二次側に抵抗を挿入すると,発電機動作の場合にも比例推移が成り立ち,同一負荷トルクで回転速度は上がる。
巻上機,クレーンなどで重量物を降下させる場合に使用される。
また,この領域では誘導発電機として動作するが,励磁電流を必要とするため単独では発電できない。
系統と連系する場合,機械的な入力が変動しても商用周波数の電力が得られる。
構造が簡単で低コストであるかご形誘導発電機が風力発電に広く用いられてきた。
かご形誘導発電機は一次端子電圧が一定ならば,その滑りだけで出力が決まるため,風速の変動によって出力が変動する。
electrical-engineer.hatenablog.jp
$s$ > 0 の領域
回転子が回転磁界と反対方向に回転する。
発生トルクは正であるが回転子の回転方向と反対であるため,機械的出力は負となる。
これを誘導ブレーキといい,重量物の低速度巻下ろしなどに利用される。
機械的出力は負であるから,動力は外部から供給され,この動力及び一次側から供給される入力は主として二次抵抗で熱として消費される。
トルクの比例推移
三相誘導電動機の一次端子から見たインピーダンスは,二次抵抗 $r_\text{s}$ と滑り $s$ の比 $r_\text{s}/s$ の関数になる。
したがって,一次電流,力率,トルクなども $r_\text{s}/s$ の関数となる。
このことは電動機の回転速度が変わっても, $r_\text{s}/s$ が一定ならばトルクは同じ値になることを示している。
このような特性をトルクの比例推移という。なお,最大トルクは,二次抵抗値にかかわらず一定であり,これを生じる滑りは,二次抵抗が大きいほど大きくなる。
この特性を利用して,巻線形誘導電動機では,二次側にスリップリングを介して抵抗値を変えることができる外部抵抗を接続し,始動時にはこの値を大きくしてトルクを大きくし,定常運転時にはスリップリングを短絡する。
このための二次挿入抵抗には,金属抵抗器あるいは液体抵抗器が用いられる。
三相誘導電動機の不平衡運転
誘導電動機に接続されている三相電源の供給電圧が不平衡になった場合,対称座標法を用いて正相分と逆相分とに分けて電流を計算し,重ねの理(重ね合わせの理)によって実際の電流を求めることができる。
正相電圧に対して誘導電動機が滑り $s$ で運転しているとき,逆相電圧に対しては滑り $2-s$ で運転している。したがって,誘導電動機の逆相等価回路は,正相等価回路における滑り $s$ を滑り $2-s$ に置き換えたものとなる。
また,電動機トルクについては,正相電流によるトルクに対して逆相電流によるトルクは逆方向であるから,三相電源の供給電圧が平衡である場合のトルクに比して,不平衡である場合にはその大きさは減少する。
通常は三相運転であるが,もし三相電源と誘導電動機を接続する線路の 1 線が断線した異常な場合には,他の 2 線から電圧・電流の供給を受けて,単相誘導電動機として運転を継続する。
逆相制動機
実際の動作では,すべり $s$ で運転中の三相誘導電動機の一次側の 3 端子中 2 端子を入れ替えると,回転磁界の方向が逆転し,電動機の滑りが $s$ から急に $2-s$ になり,誘導制動機として動作する。
これを逆相制動またはプラッキング(plugging)と呼ぶ。
逆相制動を行うと,大きな電流(電動機に定格電流の 500 ~ 800 % 程度)が流れる割に制動トルクが小さいので,三相巻線形誘導電動機では二次回路に抵抗を挿入し,比例推移を利用して負荷に適したトルクとし,同時に電流を制限し,電動機の発熱を抑える必要がある。
誘導電動機の速度制御
誘導電動機の速度を自由に,かつ広範囲に制御できれば,回転機の可変速制御を必要とする分野で広く応用できる。ここに誘導電動機の同期角速度を $\omega_\text{s}$,極数を $2p$,滑りを $s$,電源周波数を $f$ とすると,回転角速度 $\omega_\text{m}$ は,次のように表現される。
\[ \omega_\text{m}=\omega_\text{s}(1-s)=\frac{2\pi f}{p}(1-s) \]
上式より,極数,滑りあるいは周波数のいずれかを変化できれば,誘導電動機の速度は制御できることになる。
極数を変化させる方法はあらかじめ極数が変更できるように巻線の接続法を工夫しておき,必要に応じてスイッチで切り換えることにより変える方法であるが,段階的な制御であり連続した可変速を必要とする用途には不向きである。
滑りを変化させる方式では,誘導電動機の発生トルクが入力電圧の 2 乗に比例することを利用する一次電圧制御がある。
本方式は滑りの増加とともに電動機の効率が悪化するので,電動機の効率を重視する用途には不向きである。
周波数を連続的に制御する方式は,近年の自励式インバータ電源(電力変換器)による駆動が可能となったことにより広く採用されるようになった。
例えばオープンループ制御のインバータ電源による駆動では $V/f$ 一定制御が行われ,電動機の磁束が飽和しないようにしている。
さらに精密な回転機の制御が求められる時には,ベクトル制御による高精度制御が行われる。
一次電圧制御
一次電圧制御は,誘導電動機のトルク速度特性が電圧のほぼ 2 乗に比例して変化する性質を利用したものである。
この方式は電圧の変化に対する速度制御の範囲が狭く,また,速度を低くするために一次電圧を下げると,滑りが大きくなって二次回路の損失が増大するので,適用は小容量機に限られる。
一次周波数制御
一次周波数制御は,周波数に比例して誘導電動機の同期速度が変化することを利用したものであり,現在,インバータ制御方式として広く適用されている。
この方式では,通常,誘導電動機のギャップ磁束を一定に保つため,周波数にほぼ比例して一次電圧も変化させている。
速度を変化させても同一負荷トルクに対する滑り周波数がほぼ一定になり,巻線形誘導電動機の二次抵抗制御に比べ,速度の変化の割合に対して滑りの変化の割合が小さいので,広い速度範囲にわたって二次損失の増加を抑制した制御ができる。
二次励磁制御
巻線形誘導電動機の二次端子に外部から二次電圧と平衡する滑り周波数の電圧を与え,その大きさ・位相などを変化させて速度を制御する方式で,代表的な方式としてクレーマ方式とセルビウス方式がある。
クレーマ方式
クレーマ方式は,誘導電動機の二次端子における電力を補助変換装置を介して機械力に変換し,誘導電動機の軸へ返す方式である。
セルビウス方式
セルビウス方式は,二次電力を補助変換装置を介して電源周波数の交流電力に変換して電源へ返す方式である。
インバータの出力電圧の大きさと周波数とを制御する方法
電動機の 1 相当たりの等価回路は定常状態にある電動機の特性を表すので,それに与える電圧及び周波数を決めると,ある運動点における平均トルクが求まる。
したがって,その電圧及び周波数をインバータで発生することで平均トルクの制御ができることになる。この代表例が $V/f$ 一定制御である。
$V/f$ 制御
三相誘導電動機の可変速制御方式として,三相電圧形 PWM インバータを用いた $V/f$ 制御が広く用いられている。
誘導電動機の回転磁界の回転速度と回転子の回転速度はほぼ等しいので,回転磁界の回転速度を調節することによって,回転子のおおよその回転速度を制御することができる。
$V/f$ 制御では,可変速制御を行う際に,目標とする回転子の回転速度が変化しても,一次電圧と一次周波数との比率を一定に制御する。
これによって,回転子の回転速度にかかわらず,回転磁界を発生するための励磁電流の振幅をほぼ一定に保つことができる。
このとき,二次巻線に誘導する起電力及び二次漏れリアクタンスは滑り周波数に比例する。
その結果,回転磁界の回転速度が変化しても,トルクと滑り周波数との関係はほとんど変わらない。
実際の誘導電動機に $V/f$ 制御を適用する場合,低速領域ではトルクの低下が生じる。
これは,誘導電動機の一次巻線抵抗による電圧降下に起因するものであり,この電圧降下の補償制御が必要になる場合もある。
また,高速領域では,インバータの出力電圧が飽和し,$V/f$ 制御の比率を一定に制御できない場合がある。
このような場合,一次電圧を一定にして回転子の回転速度を増加させる制御方法がある。
一次電圧を一定としたとき,滑り周波数が一定であれば,誘導電動機のトルクは回転子の回転速度に対しておおよそ 2 乗に反比例の関係となる。
V/f 一定制御されている誘導電動機のトルク特性
V/f 一定制御されている誘導電動機の定常状態のトルク特性が,端子電圧の周波数 $f_1$,$f_2$ に対し,図のように与えられている。
また,負荷のトルク特性は回転数 $N$ に関わらず $T_\text{L}$ 一定で図のように与えられている。
このとき,電動機の回転数はそれぞれ,$N_1$,$N_2$ である。
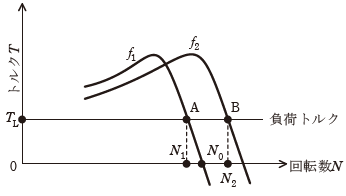
今,この電動機が周波数 $f_2$ にて運転中で,回転数が $N_2$ のときに,周波数 $f_1$ に切り換え,$N_1$ まで減速して,点 A で負荷トルクと電動機トルクがつりあう。
$N_2$ からの減速過程のうち,$N_0 \lt N \lt N_2$ では電動機は発電機動作をするので,電動機は負のトルクを発生する。
これにより減速する回転系としては,軸受の摩擦などを無視すると,この発電機動作のトルクと負荷トルクの合成が減速トルクとなる。
続いて,$N=N_0$ まで減速すると,このとき,電動機は同期速度で運転しているので,負荷トルクのみが減速トルクとなる。
さらに減速して,$N_1 \lt N \lt N_0$ となると,電動機は電動機動作をするので,正のトルクを発生する。
この区間では電動機の発生トルクは負荷トルクより小さいので,負荷トルクから電動機トルクを差し引いた差が減速トルクとして働く。
インバータの出力電流をその大きさと位相とを含めて制御する方法
電動機の一次回路と二次回路とを電圧方程式で記述することによって,電流及び瞬時トルクを求めることができる。
ベクトル制御を用いて電流を制御することによって,一次電流に含まれるトルク成分電流と磁束成分電流は個別に制御することができるので,他励直流電動機と同等の良好なトルク特性となる。
このとき,二次の鎖交磁束の位置,すなわち磁束軸をとらえる必要がある。
その方法として,直接磁束を検出することをしないで,そのときの回転子の位置に滑り角周波数の積分値を加算して磁束軸を求める制御方法が多く用いられている。
参考文献
- 電気学会 電気専門用語集(WEB 版)
- 令和4年度 第一種 電気主任技術者 一次試験 機械 問2「誘導電動機の等価回路」
- 令和4年度 第二種 電気主任技術者 一次試験 機械 問2「インバータにより V/f 一定制御されている誘導電動機」
- 令和4年度 第二種 電気主任技術者 二次試験 機械・制御 問2「三相かご形誘導電動機」
- 令和2年度 第二種 電気主任技術者 一次試験 機械 問3「誘導電動機の速度制御」
- 令和元年度 第二種 電気主任技術者 一次試験 機械 問1「誘導電動機」
- 平成30年度 第二種 電気主任技術者 一次試験 機械 問1「三相誘導電動機」
- 平成29年度 第二種 電気主任技術者 一次試験 機械 問5「三相誘導電動機の基本的な特性」
- 平成25年度 第二種 電気主任技術者 一次試験 機械 問3「インバータによる電動機の運転」
- 平成24年度 第二種 電気主任技術者 一次試験 機械 問1「三相誘導電動機の滑り」
- 平成23年度 第二種 電気主任技術者 一次試験 機械 問1「三相誘導電動機の速度制御」
- 平成21年度 第二種 電気主任技術者 一次試験 機械 問1「三相誘導電動機の不平衡運転」
- 平成18年度 第二種 電気主任技術者 一次試験 機械 問1「三相誘導電動機の制動」
- 平成17年度 第一種 電気主任技術者 一次試験 機械 問5「三相誘導電動機の特性算定」
- 平成16年度 第二種 電気主任技術者 一次試験 機械 問5「三相かご形誘導電動機の速度制御」
- 平成15年度 第二種 電気主任技術者 一次試験 機械 問5「三相誘導電動機の特性」
- 平成9年度 第一種 電気主任技術者 一次試験 機械 問3「電動機の速度制御」
更新履歴
- 2022年1月17日 新規作成
- 2022年1月22日 参考文献に「平成25年度 第二種 電気主任技術者 一次試験 機械 問3」「平成24年度 第二種 電気主任技術者 一次試験 機械 問1」「平成23年度 第二種 電気主任技術者 一次試験 機械 問1」を追加
- 2022年2月11日 参考文献に「平成21年度 第二種 電気主任技術者 一次試験 機械 問1」「平成18年度 第二種 電気主任技術者 一次試験 機械 問1」「平成17年度 第一種 電気主任技術者 一次試験 機械 問5」「平成16年度 第二種 電気主任技術者 一次試験 機械 問5」「平成15年度 第二種 電気主任技術者 一次試験 機械 問5」を追加
- 2022年2月12日 参考文献に「平成9年度 第二種 電気主任技術者 一次試験 機械 問3」を追加
- 2022年8月27日 参考文献に「令和4年度 第二種 電気主任技術者 一次試験 機械 問2」を追加
- 2022年8月28日 参考文献に「令和4年度 第一種 電気主任技術者 一次試験 機械 問2」を追加
- 2023年1月7日 参考文献に「電気専門用語集(WEB 版)」を追加
- 2023年1月15日 参考文献に「令和4年度 第二種 電気主任技術者 二次試験 機械・制御 問2」を追加